
三维成像测量科学研究系统由极光眼和移动载台组成,可对放置在移动载台上的各类物体进行三维轮廓扫描,获取物体三维尺寸、位置姿态、数量等信息。系统通过线激光辅助定位,增强物体表面纹理特征,获取物体的高精度三维数据。采用“自然学习”技术对三维数据进行处理,分割出单个物体的立体信息,从而完成物体计数、测量、分类、检测等功能。系统软件界面实时显示测量的数据,后台可对测量的数据进行保存,供用户查询和分析。
系统可对谷物、工件、箱体等物体进行三维检测、位姿计算和智能认知,可应用于农业研究、智能制造研究、物体三维建模、机器视觉算法研究等领域。系统提供基础应用程序和二次开发SDK,用户可灵活选择。
产品特点:
-
智能认知:根据训练样本对物体特征点智能识别,快速建立物体认知模型,从而实现智能认知和学习。
-
-
环境适应性强:采用线激光辅助定位,可有效抑制各种光线干扰,无阴影,在光线不足的环境下也可正常检测,对工作环境光照适应性强。
-
-
支持多种应用库:提供伟景智能立体智能视觉应用库,同时支持OpenCV、MATLIB、LibView、TensorFlow等应用库,用户可二次开发。
-
-
支持多种开发语言:支持C++++、Pathon、JAVA等多种编程语言,提供相应编译环境的使用说明和示例,用户可灵活选择。
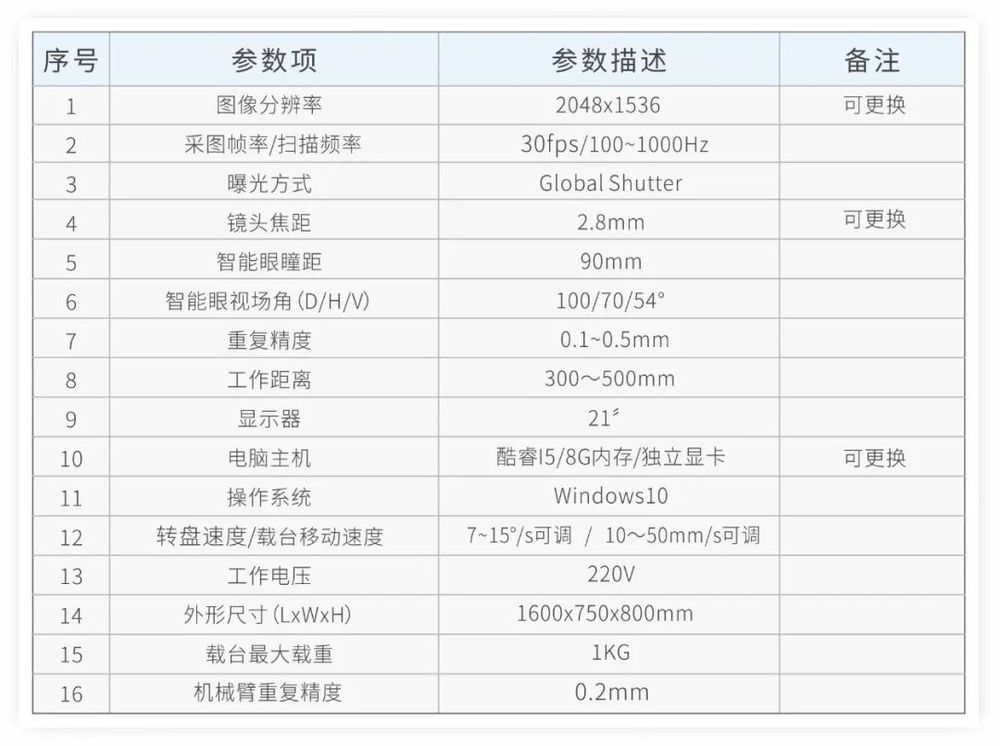
产品指标:
产品应用:
01、谷物计数和三维测量
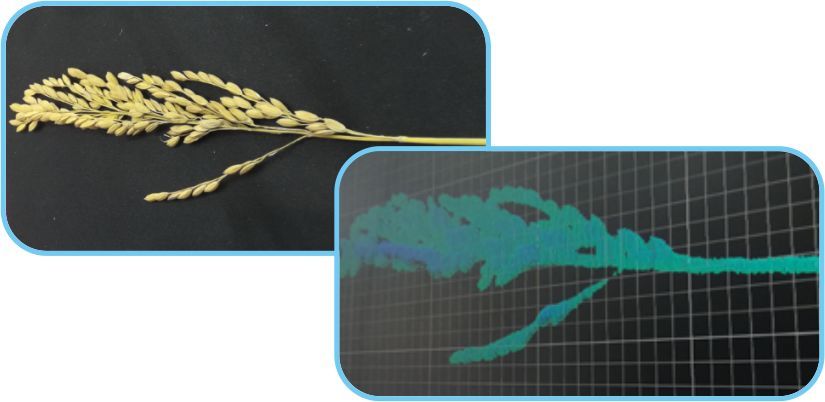
对平铺的谷粒、小麦、黄豆等农产品进行颗粒计数和体积测量,可用于农作物产量统计分析研究。提供基础应用程序和二次开发SDK。
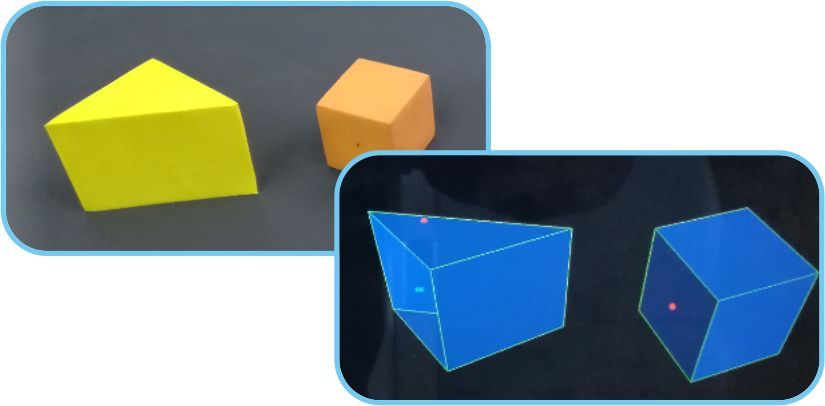
02、物体选择性认知
对物体进行三维扫描后,根据物体的已知三维模型对获取的点云图进行三维重构和匹配,进行选择性认知,可用于物体智能分拣应用研究。提供基础应用程序和二次开发SDK。
03、物体位置姿态识别
检测物体空间位置和姿态,智能输出抓取点空间坐标,可应用于机器人上下料、自动抓取等应用的研究。提供基础应用程序和二次开发SDK。
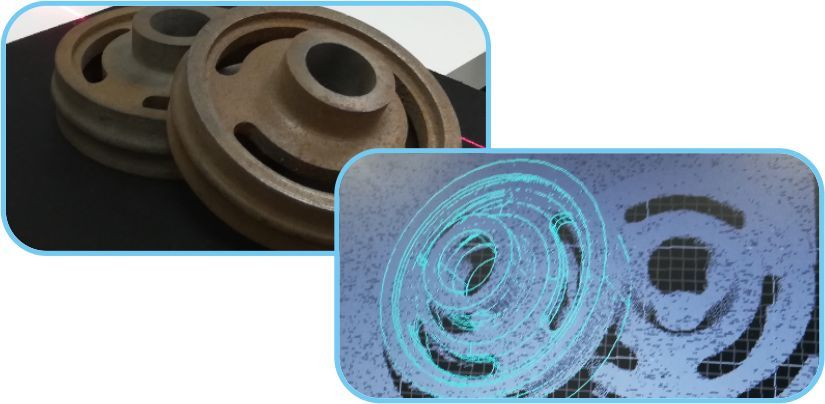
04、物体三维检测
输出物体三维扫描后生成的点云图,基于点云图可做尺寸测量,表面缺陷检测等视觉算法的研究。提供基础应用程序和二次开发SDK。

